Your Custom Text Here
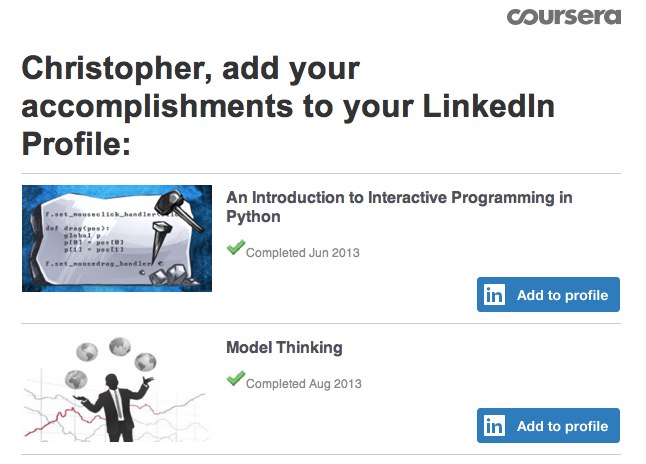
Coursera/LinkedIn integration: Hackday Winner, Best in Show
This was a joint hack between dev teams at LinkedIn and Coursera. Goal is to allow simple posting of a completed Coursera course to a user's LinkedIn profile. This is now a new feature on LinkedIn and Coursera: http://blog.linkedin.com/2013/11/14/introducing-a-new-way-to-add-certifications-to-your-linkedin-profile/
Sucess story: http://blog.coursera.org/post/104944129942/peter-baker-switched-careers-to-engineering-with
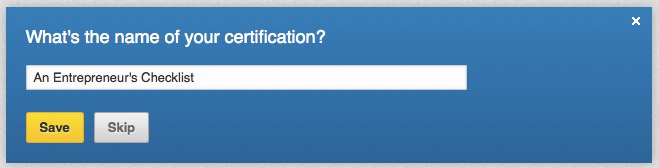
No Mo' Stalk[in]': HackDay Winner - Judge's Write-In (Every Big Social Network Should Have One)
LinkedIn is the only big social network left where you cannot completely block a member from looking at your profile. Having a stalker is a real thing, and we have no ability to allow members to block their stalkers. It's unnerving to see in your email or profile sidebar: "[Your stalker] has viewed your profile." Or maybe you have a headhunter that won't leave you alone and is really adamant that you're ruining your career by not responding to him. This hack fixes this problem, and lets you block members who are being unprofessional in a professional social network.
This is now a feature on LinkedIn: https://community.linkedin.com/questions/156990/linkedin-announces-member-blocking.html
Tarah, our fearless leader. I'm honored that she chose to include me with all these amazing women in tech. As soon as I saw this project, I knew I wanted to be involved, but it still seems surreal that I'll be a co-author. I'll update this page as more details emerge!
More squees! We now have a publisher and a book cover. Very excited to see the finished product.
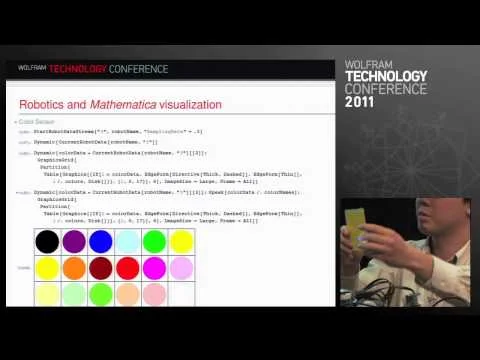
In October 2011, I gave a talk with my colleague at Wolfram, Lambert Chao. A recording of the presentation can be seen below.
The talk abstract:
"In this talk we show new Mathematica capabilities for remotely communicating with and controlling the LEGO MINDSTORMS NXT 2.0 robot. We will demonstrate ways to use Mathematica to acquire, process, and visualize sensor data and use that information to control the NXT's behavior."
Navigation is a basic problem in robotics. Many succesful algorithms exist for navigation, but these solutions generally rely on information such as exact coordinates, exact distances, and orientation. I-Bug is an intensity-based bug algorithm which uses none of these and still guarantees that the robot will attain its goal, to reach the tower.
In our first I-Bug paper, accepted to IEEE ICRA 2009, I-Bug is in an unknown 2D environment with possibly infinite but locally finite piecewise-analytic obstacles. The tower emits a signal, and the robot's plan is based on sensing the intensity of this signal. A proof of convergence and bounds are provided for both the case of the level sets being radially symmetric and asymmetric. The final version of the paper, with proofs ommitted due to length constraints, can be found here, and the complete version can be found here. The presentation from ICRA 2009 is available here.